Overall Circuit Overview
The circuit can be broken down into three main steps:
- The Arduino, for some reason (could be a hit, or it choosing for the mole to go up) chooses to change the state of a mole.
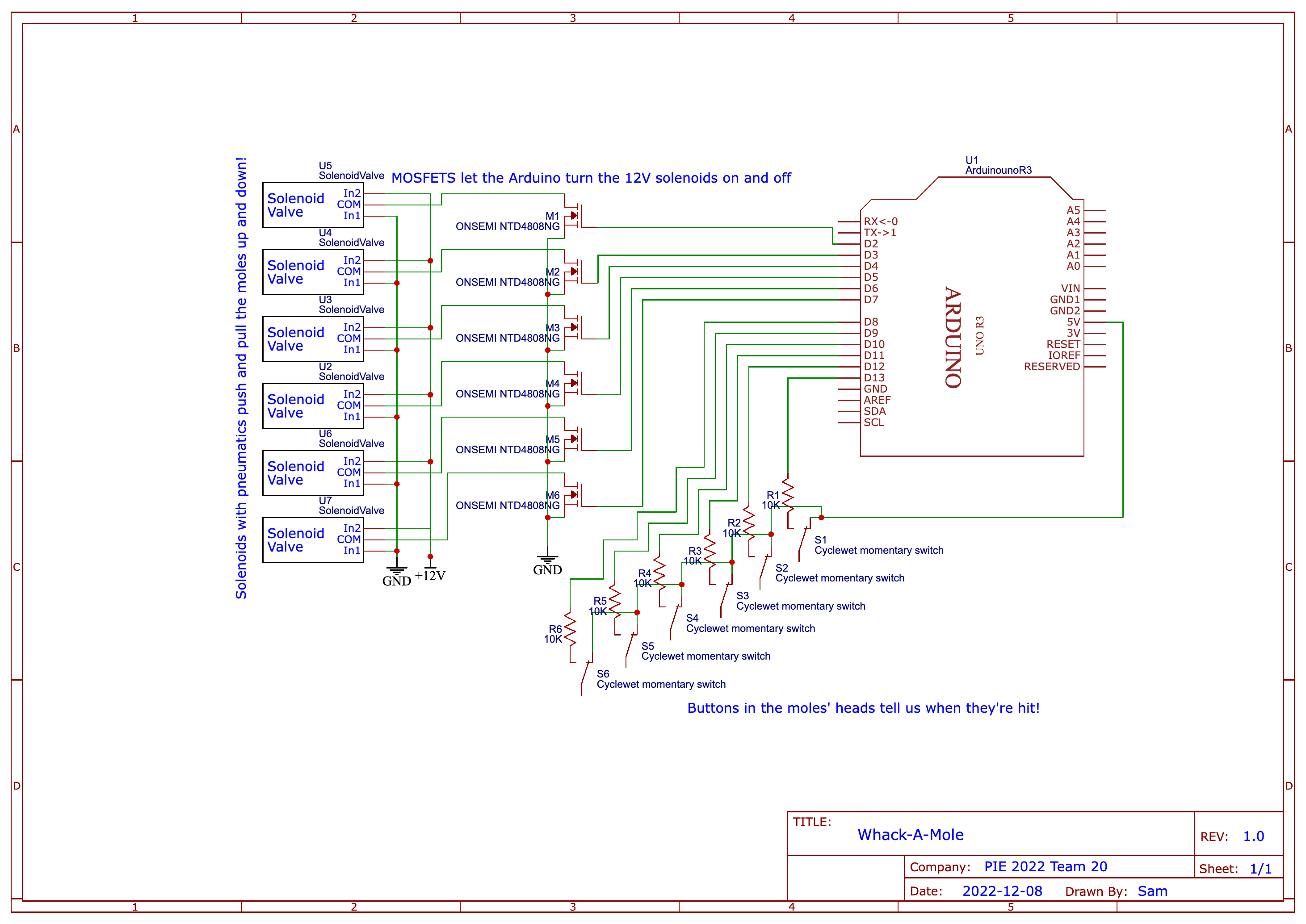
- The Arduino sends a signal (by setting a pin to high or low) to the MOSFET, turning it on/off and allowing/blocking current flow through the solenoid.
- The solenoid generates a magnetic field, which moves the plunger in the pneumatic system and causes the mole to pop up through the hole.
As the game continues, the Arduino controls the movement of the moles by turning the MOSFETs on and off. The Arduino will also send data when moles are hit by the player over the serial connection to the Raspberry Pi, which will display the score and other information on the scoreboard.
See the circuit diagram for more information on our wiring.
Arduino Firmware Overview
The firmware on the Arduino has three main responsibilities:
- Randomly putting moles up and down
- Checking for button presses (when moles are hit), then lowering moles when they’re pressed
- Communicating valid hits (button presses when the mole is up) to the Pi, with how long it took for the player to hit the mole
We use one external library: Benoit Blanchon’s excellent ArduinoJSON library. This allows us to serialize output to the Pi and deserialize input from the Pi.
The Mole Class
In order to do that, we wrote a class that controls a Mole. It has a few fields and methods:
class Mole
{
public:
// pin the mole's solenoid is on
int solenoidPin;
// pin the mole's button is on
int buttonPin;
// if the mole is up
bool isUp;
// when the mole went up
unsigned long timeUp;
// how long the mole should be up for
uint32_t upFor;
// time until the mole can be pressed / go up
unsigned long timeout;
/*
Create a new mole.
@param solenoidPin The pin that the mole's solenoid is on.
@param buttonPin The pin that the mole's button is on.
*/
Mole(int solenoidPin, int buttonPin);
bool raiseFor(unsigned long currentTime, int ms); // raise the mole for ms
bool lowerIfTimePassed(unsigned long time); // lower the mole if it has timed out, returns whether it was lowered
int lower(unsigned long time); // lower the mole whether it has timed out or not, returns how long it was up for
void tickTimeout(unsigned long time); // clear the timeout if it has elapsed
bool timeoutIsActive(unsigned long time); // check whether there is an active timeout
bool buttonPinIsHigh(); // check whether the mole's button is being pressed
void print(); // print the mole to the console, useful for debugging
StaticJsonDocument<64> toJson(); // return a JSON representation of the mole, useful for debugging
};
Setup and Configuration
Some configuration settings are available and static as the code runs:
int maxMolesUpconfigures the maximum number of moles up at any one timeint moleUpTimeBetweenMs[2]is a tuple containing the minimum and maximum amounts of time in milliseconds that a mole can go up for. Amounts of time are chosen randomly using the first number in the tuple as the lowest possible value and the second number in the tuple as the maximum possible value.bool debugdetermines whether the firmware will print debug messages to the console
There are also some settings for the moles that effect gameplay:
uint32_t timeout_after_raisecontrols how long a mole has to wait before its button being pressed counts as a hit. Since the pneumatics exert so much force on the moles, the buttons often got pressed as they got shot up. This timeout ensures that it’s a player hitting the mole, not itselfuint32_t timeout_after_hitcontrols how long a mole has to wait after it has been hit down to come up again. It ensures that the same mole doesn’t just go up, get hit, go down, and go back up immediately. We found that this made the game far more funuint32_t timeout_after_timeupcontrols how long a mole waits after it comes down when a player didn’t hit it.
A few global variables also hold some state:
bool gameRunningtells whether the game is running: if not, the entire game loop is skippedStaticJsonDocument<64> moleHitDocumentholds a JSON document in memory that we’ll change and serialize to efficiently tell the Pi that a mole has been hitMole *moles[6]holds instances of all 6 moles, initialized with their solenoid pin and button pin
Finally, the setup() function runs which just initializes Serial communication, and sets the Serial timeout to 10ms. It also sets the moleHitDocument.type property to mole_hit, which will never change.
The Game Loop
The game loop, which just returns if gameRunning is false, has all of the core logic.
- First, we call the
millis()function and assign it to a variable. Since we’ll use this value many times, we can ensure that the value is always the same throughout a single function run and makes the function more efficient, which is important for reasons we’ll discuss later. - We run through all moles, and call their
tickTimeoutmethod with thetimevariable. This ensures that any timeouts that have elapsed are cleared. - If the mole is up, we’ll also:
- Lower it, if the player didn’t hit it and it’s been up for too long. If this happens, we’ll set a
didLowervariable to true, which will cause us to skip to the nextloop()iteration. - If the mole is still up (didn’t just get lowered), its timeout is not active, and its button pin is high, we’ll lower the mole by calling
mole->lower(time), and tell the Pi that a mole has been hit, with the uptime value returned from thelowercall. - Finally, if the mole isn’t currently being pressed, we’ll increment a
numMolesUpvariable, which will tell us if we can raise a mole later on.
- Lower it, if the player didn’t hit it and it’s been up for too long. If this happens, we’ll set a
- Check if we can raise a mole (if
numMolesUp < maxMolesUp). If we can:- We’ll use the
random(0, 6)function to decide which mole we want to raise - If that mole is up or its timeout is active, we’ll just return and try again on the next
loop()iteration - Since it’s not currently up, we’ll choose how long it’ll be up before it times out by calling
random(moleUptimeBetweenMs[0], moleUptimeBetweenMs[1]) - Finally, we’ll call
mole->raise(time, timeToRaise), which will raise the mole and set its timeouts
- We’ll use the
Ensuring the Game Loop is Efficient
Since the Uno only supports hardware interrupts on two pins, we can’t use them for all six moles. This means we must use digitalRead() to check if a button is being pressed, and, since moles are momentarily hit, we need to check really often to ensure that we don’t miss a hit.
This means that the game loop must be as efficient as possible. We do this by:
- Using the
millis()function to get the current time, and storing it in a variable. This ensures that the value is always the same throughout a single function run, and makes the function more efficient - Only calling
digitalRead(), a function that takes a non-insignificant time to run, on moles that are up and whose timeout is not active. This ensures that we only check the buttons of moles that are up and whose buttons can be pressed - Lowering the number of loops through the moles. Even though it’s only six moles, if we reduce the number of loops from 4 to 2, we go from 24 to 12 loops per second, which is a 50% increase in efficiency (and we did this!)
Handling Input from the Pi
We also use the serialEvent() builtin interrupt function to detect Serial input from the Pi. When Serial data is available, this function is automatically called.
Here, we:
- Check that the input is JSON, and try to decode it. If we can’t decode it as JSON, we just print an error and return.
- Allocate memory for
JsonDocuments that will hold the output value - Read the
.actionproperty from the decoded input, and perform that action. The following self-explanatory actions are available:start_game,stop_game, andget_status.
Each one allows the game loop (implemented in the Arduino loop()) to control the mole.
Sprint 1
In the first sprint, we just reused code and our circuit from Mini Project 2 (servo motor control) to get a servo to go from 0 -> 360 -> 0 on loop. This made our mole go up and down.
Sprint 2
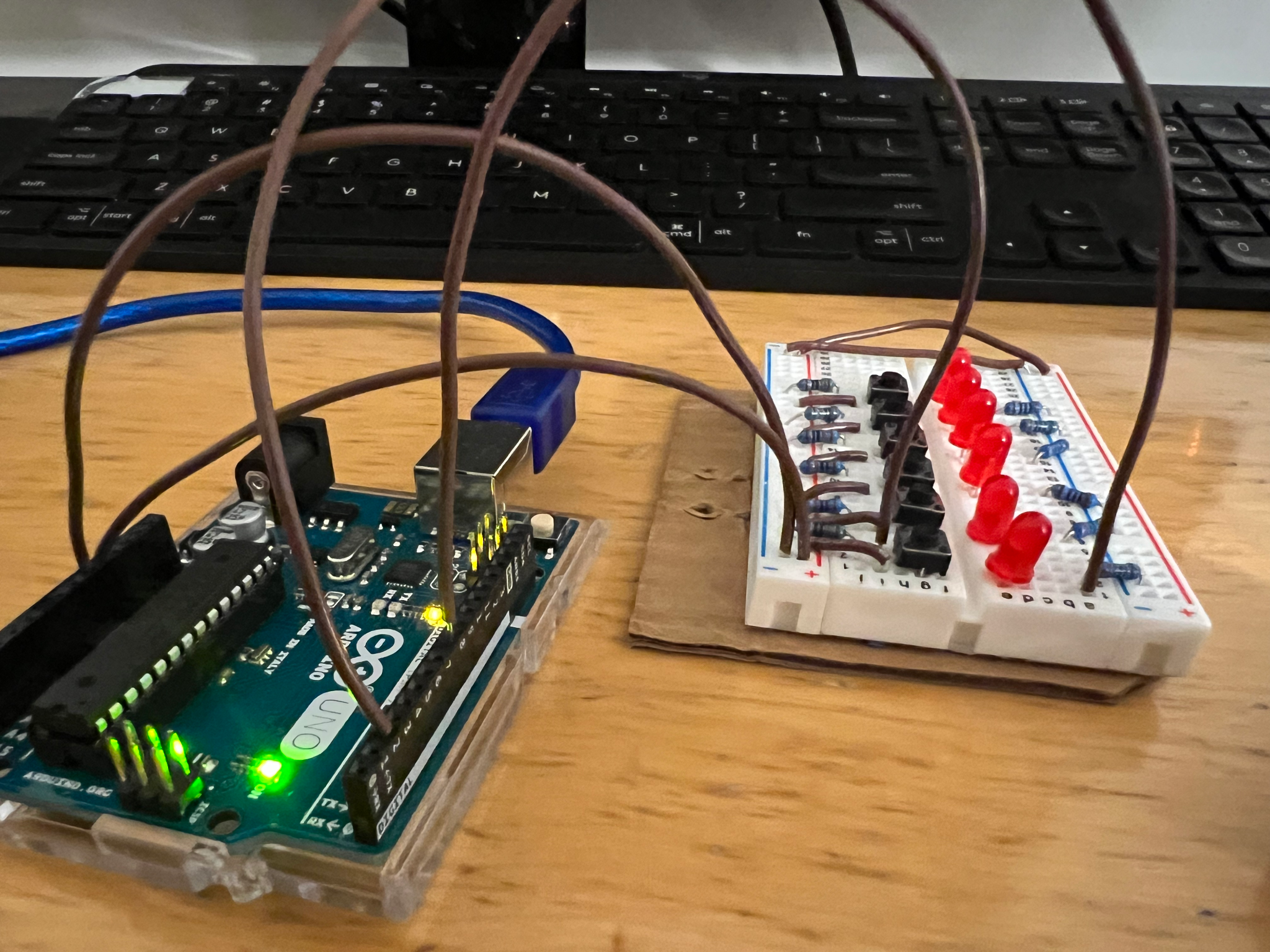
In the second sprint, we made a test circuit for the Arduino that let us test the game logic. It consisted of six buttons (which represented the buttons in the top of the moles) and six LEDs (which represented the state of the moles, up or down) connected with a 10K resistor to the Arduino. This allowed us to work on firmware separate from the mechanical team and we got the game logic largely done here– we wrote the Mole class, implemented many methods and wrote the first version of the game logic, notably without the timeouts.
We also (and perhaps more importantly) made the solenoid control circuit. We used MOSFETs (electrical gates that control the flow of electricity in a circuit, and they allow a low-voltage device like an Arduino or a Pi to control a higher-voltage device like a 12V solenoid) to let the Arduino control the solenoids.
Sprint 3

In the third sprint of the project, we:
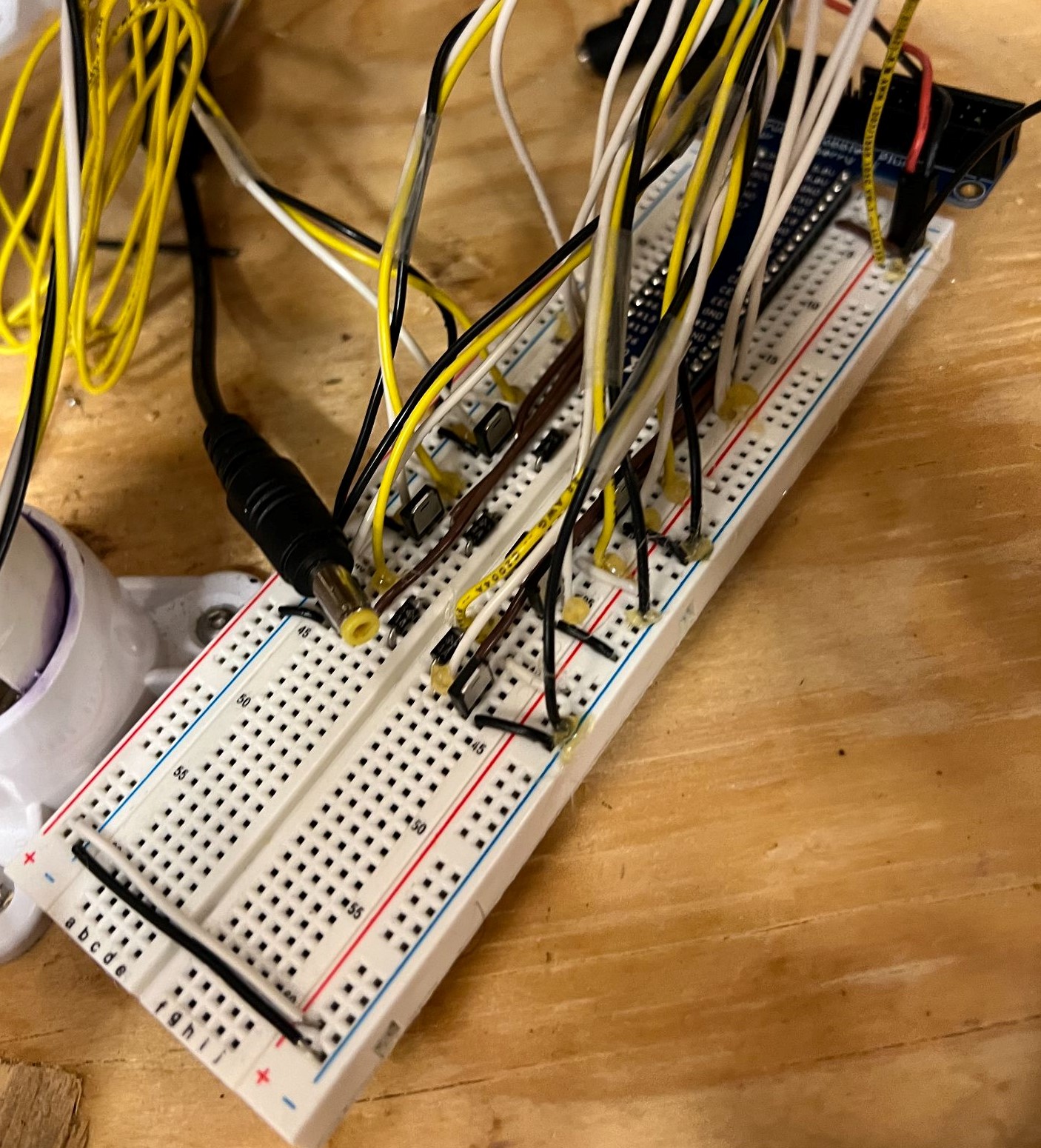
- Wired up all the solenoids with color-coded wires with matching lengths (leftmost picture)
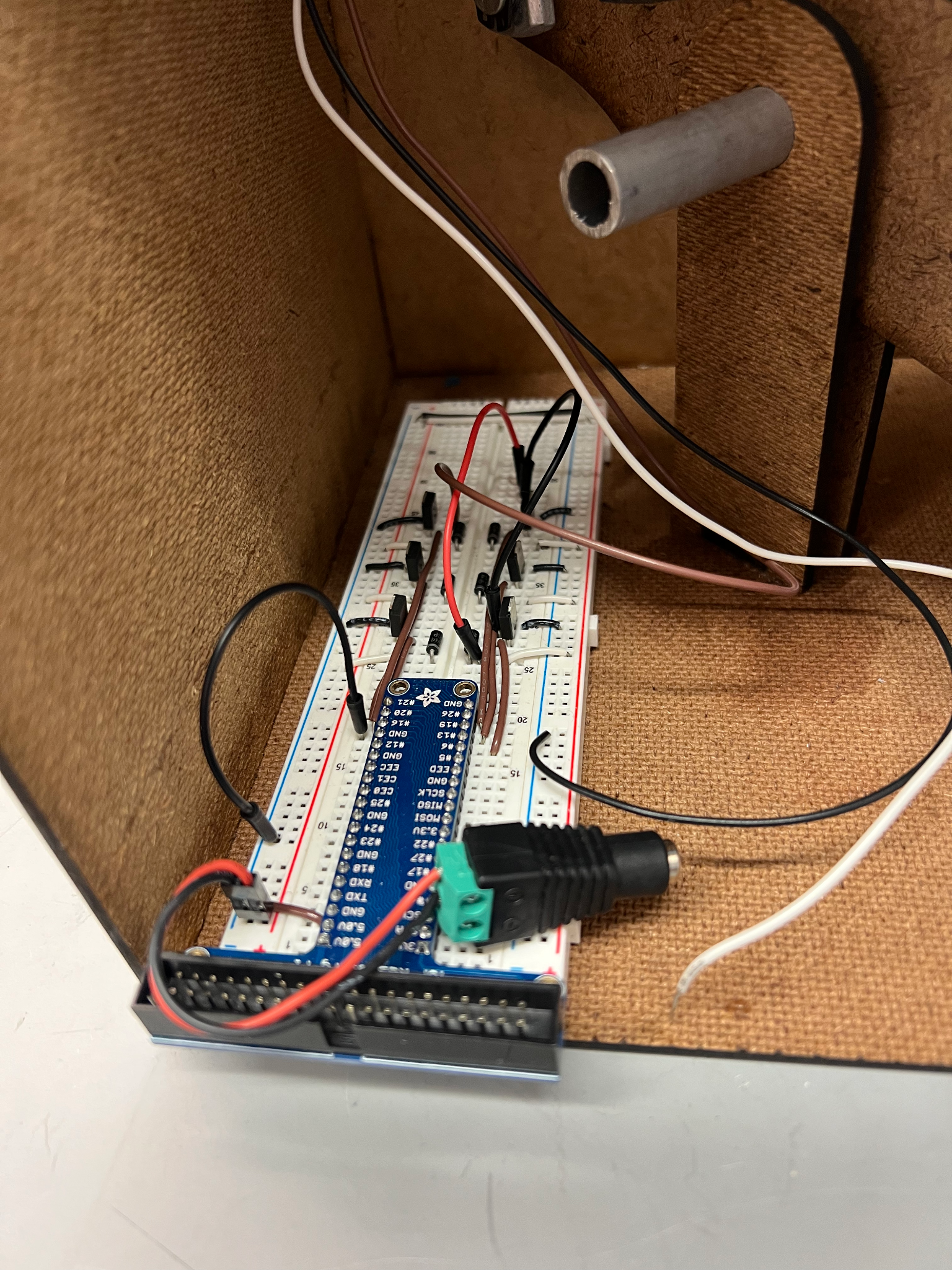
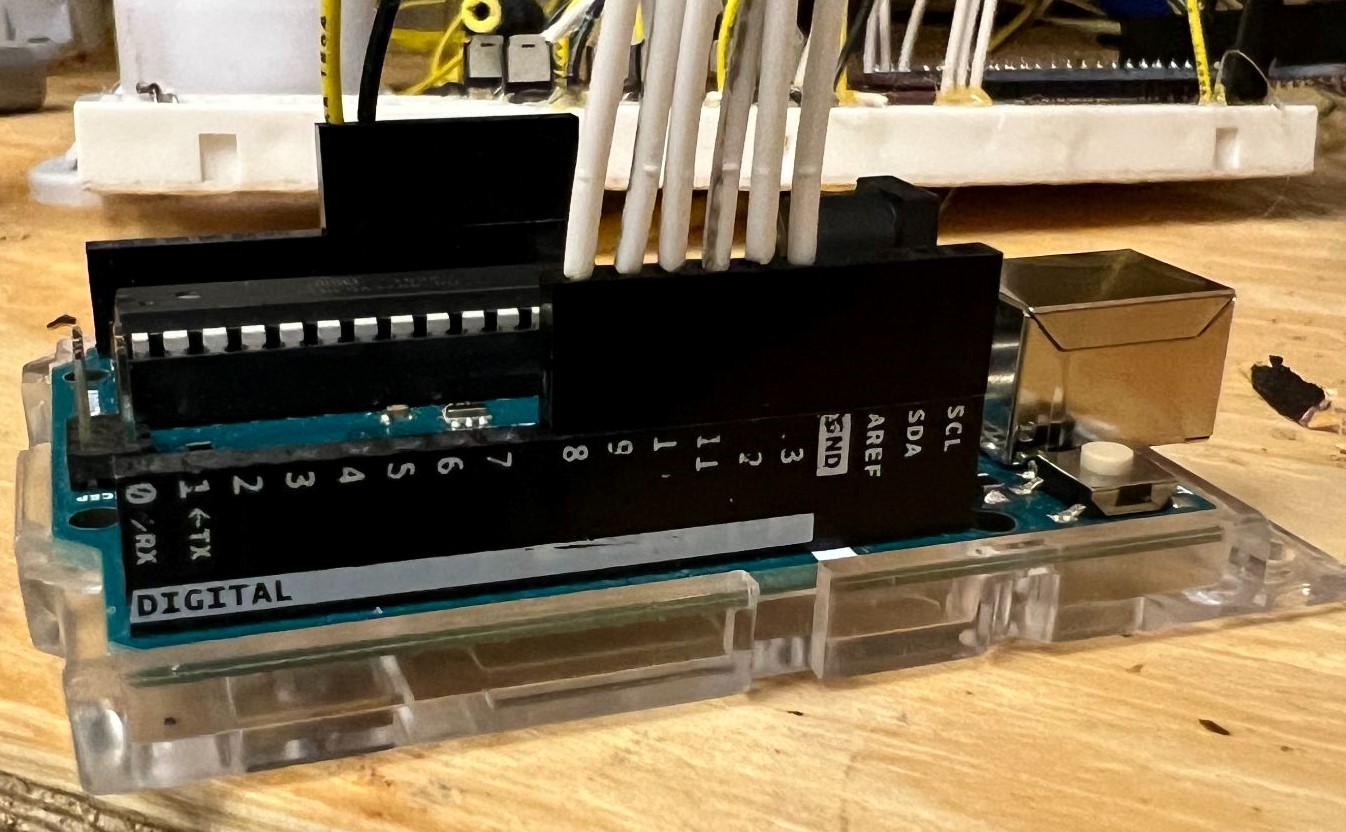
- Used PIE-provided pin headers to connect the Arduino to the solenoids and the buttons in the top of the moles (second picture)
- Set up the Arduino to be powered by the 12V solenoid power supply (the Uno
Vinpin accepts between 7-12V!) (not pictured) - Wired up the buttons inside the moles to a separate breadboard (not pictured), which put a 10K resistor between the button and the Arduino’s pin, and connected the Arduino’s pin to ground, therefore keeping the pin Low until the button is pressed, at which point the pin goes High
- Hot glued the solenoid wires to the breadboard– you shouldn’t do this! Use an Arduino protoshield! (third picture). We did this because we switched from having the Pi control the solenoids to having the Arduino control them, and we didn’t have time to solder the wires to the protoshield
- Got the Arduino to control the solenoids and the buttons in the top of the moles (not pictured)
Final Sprint
In the final sprint of the project, we focused on playtesting and adjusting the code.
As we played, it became clear that, since there was about a 1/4 chance for each mole to go up, the same moles were going up over and over again. We spent a bunch of time creating the timeout system that kept moles down for a certain amount of time after they were hit, and this made the game significantly more fun, when the timeouts were right, and we found the right values with trial-and-error.
We also somewhat merged with the software team to ensure that the Serial output from the Arduino was in the correct format for the Pi to read, and we helped them work on the software to ensure we had a fully functional game on demo day, which we did!
Finally, we went back to the game loop and optimized the software. This helped ensure that almost all mole hits registered and that the game loop ran at a consistent speed.